
You are here
Aula 4
Objetivos
Na aula de hoje, seguiremos o tutorial 3 do SOAR. Neste tutorial, o objetivo é lidar com problemas mais complexos, que exigem a decomposição de uma meta em metas intermediárias (subgoals), de forma a ser resolvido. Para isso, utilizaremos o pequeno jogo TankSoar, desenvolvido pelo grupo do SOAR para ilustrar situações mais complexas. O nosso agente no TankSoar possuirá agora um grande número de possíveis ações e comportamentos possíveis, e o Soar deverá ser capaz de elaborar uma estratégia que coordene essas ações no tempo. Isso exigirá o uso do mecanismo de impasses e a criação de sub-estados, que iremos exercitar durante a aula.
Atividade 1
Execute o programa TankSoar e se familiarize com seu funcionamento. Verifique quais os sensores disponíveis e quais as ações possíveis a cada tanque, bem como os objetos que podem ser encontrados no ambiente. Crie 2 agentes com a base de regras simple-bot.soar e execute o programa.
Atividade 2
Execute as atividades previstas no Tutorial 3. Registre as atividades realizadas no seu relatório.
Atividade 3
Desenvolva um programa Soar, utilizando o mapa do ambiente, para fazer com que o tanque, além de suas atividades normais, dirija-se aos carregadores de energia e saúde, quando estiverem com baixa energia ou baixa saúde.
Relatório
Após a instalação e a execução inicial do TankSoar, foi estudado o comportamento inicial do Tank e seus sensores. Durante a depuração do simple-bot.soar, pode se identificar os elementos conforme notados nas figuras abaixo.

Figura1 - Exemplificação dos WME de entrada com diversos sensores ativos
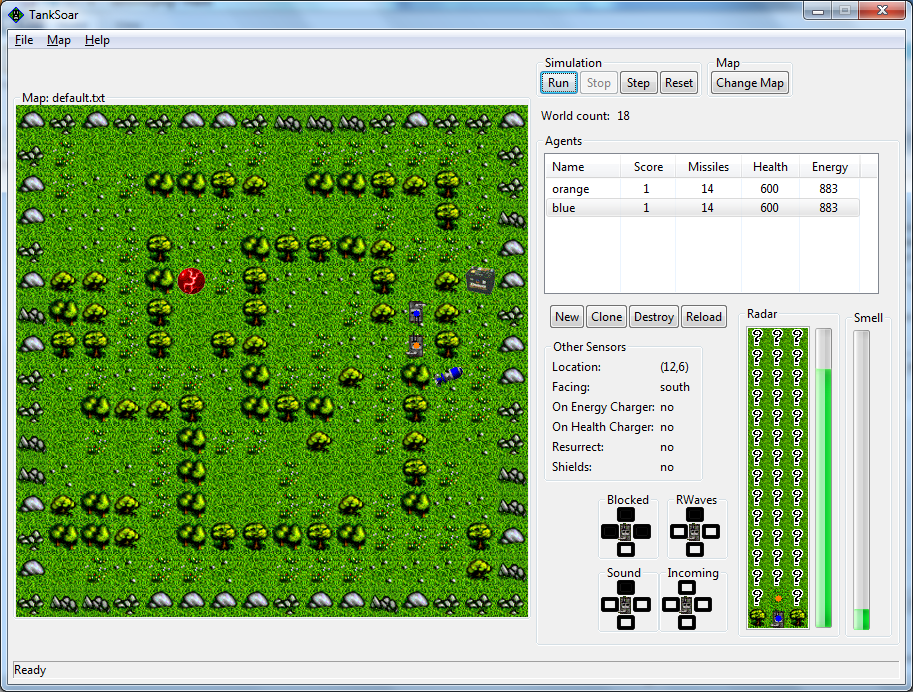
Figura2 - Representação dos sensores na aplicação TankSoar
Nas figuras Figura1 e Figura2 acima é possível notar sensores primários e secundários como Blocked (WME B1), direção, energia, pontuação atual (WME C3), ou por exemplo o cheiro (WME S3) ou até mesmo detector de ondas de radar (WME R4).
A figura a seguir mostra mais detalhadamente as informações coletadas do Radar, tanto na representação no TankSoar quanto na representação dos WMEs em Soar.

Figura3 - Elementos de Radar R14, incluindo os obstaculos (por exemplo WMEs O5, O6, O7) e também elementos de Saúde (WME H1) e suas respectivas posições e distâncias.
Um outro elemento visto foi o recarregamento do Tank após pegar um elemento de energia, conforme ilustrado na Figura4.
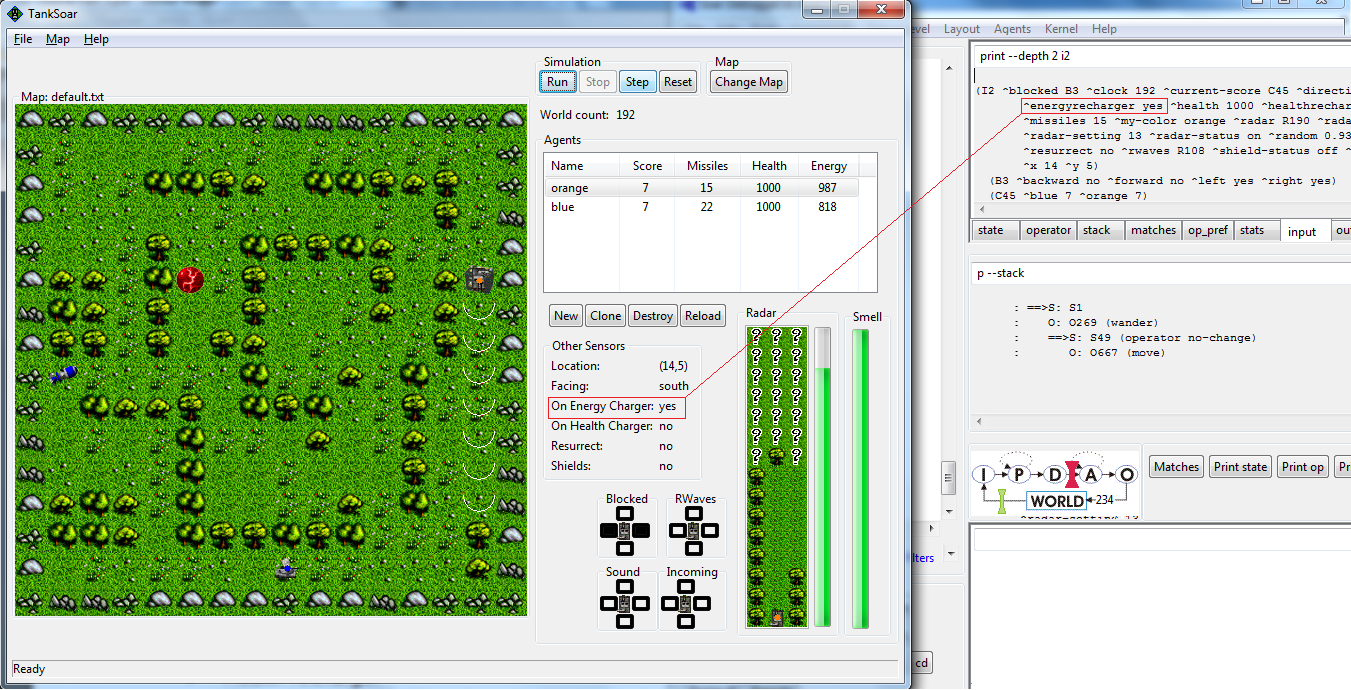
Figura4 - Sensor de Recarga de Energia
Outros dois elementos analisados foram os Sensores de Vinda e o lançamento de Mísseis (Incomming Sensor e Fire Missile) conforme Figura5 e Figura6 abaixo.
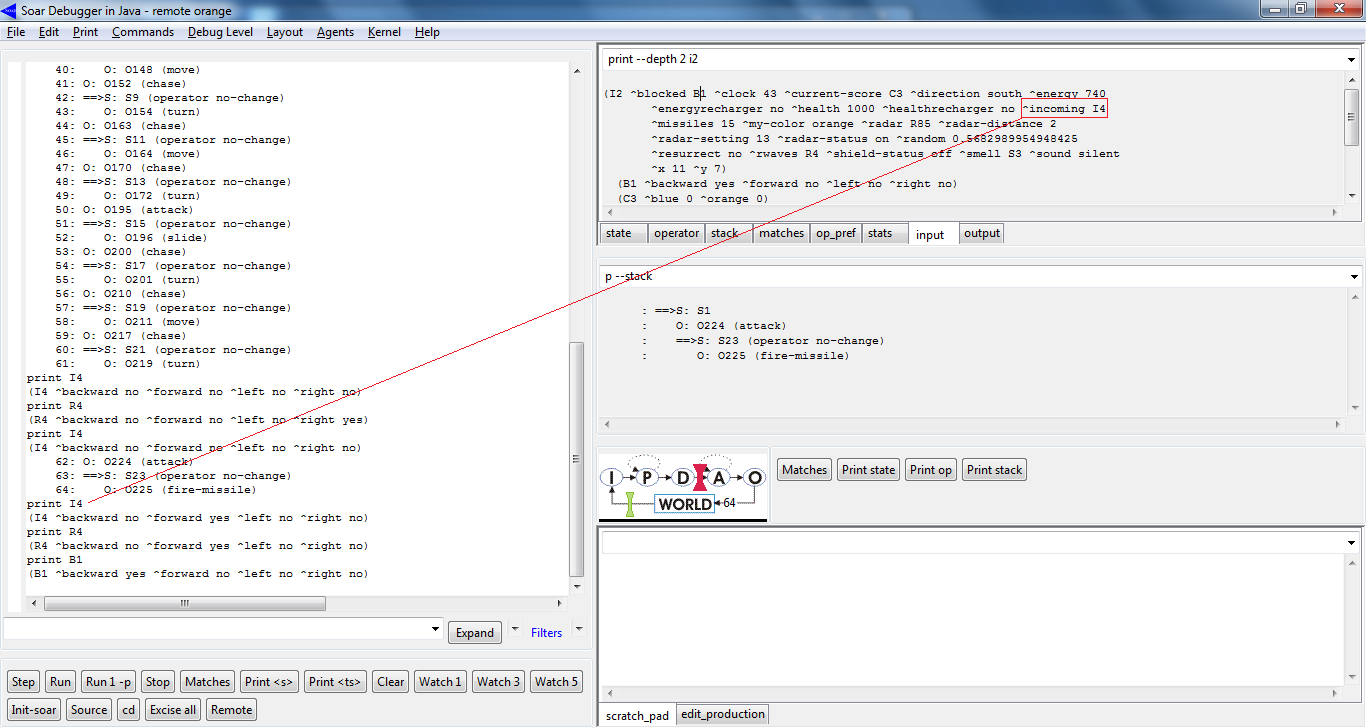
Figura5 - Incomming Sensor
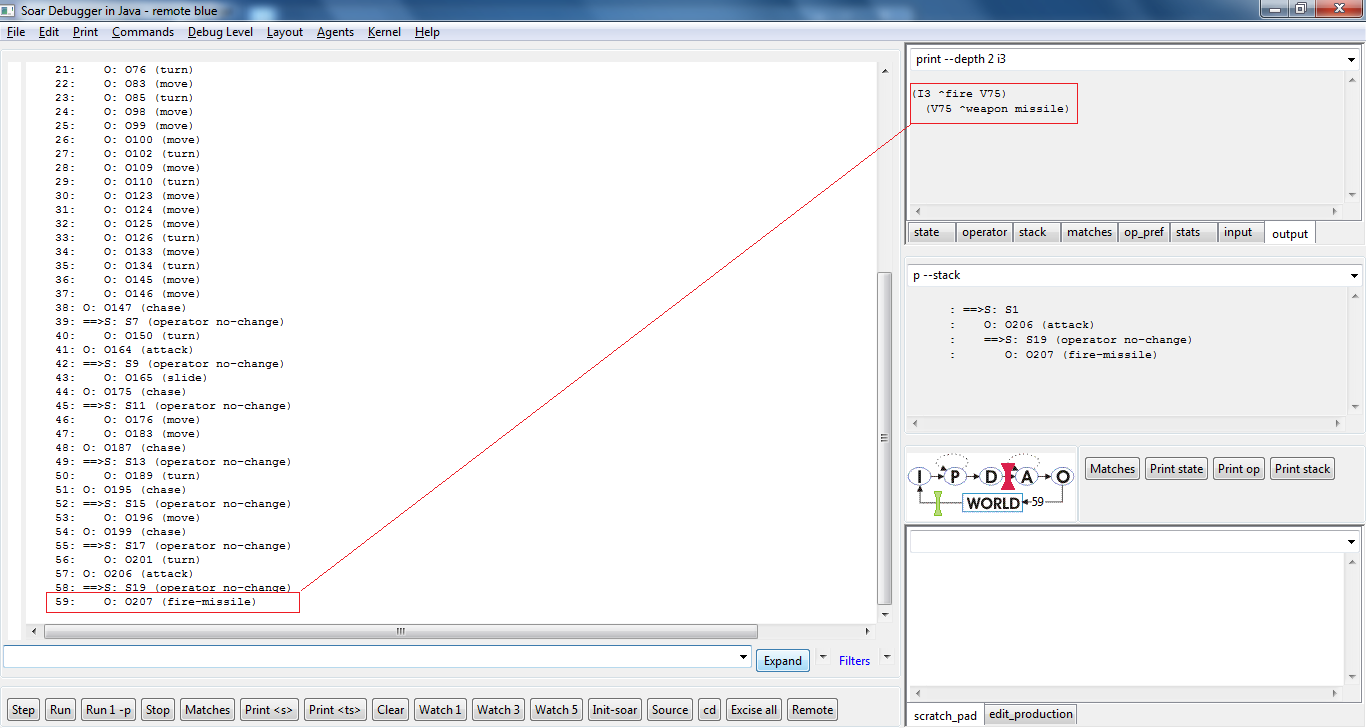
Figura6 - Ouput - Fire Missile
Durante a execução do tutorial, foi possível notar a hierarquia dos subgoals conforme representados na figura abaixo.
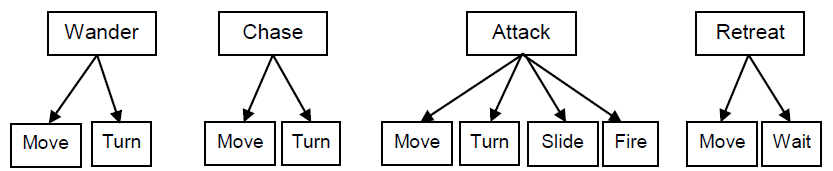
Figura7 - Divisão dos subgoals
A decisão para cada subgoal é definida baseado em uma série de parametros lidos dos sensores. Por exemplo, o ataque deve ocorrer caso tenha um tanque identificado e tenha energia suficiente para a batalha. Nesse subgoal o tanque tomará a decisão necessária (virar, mover, deslizar) para então disparar. Outro exemplo é o de perseguir, onde baseado na proximidade de um tanque (medido pelo sensor de som), ele começará a perseguir o tanque até encontrar a fonte geradora do som.
Um detalhamento para cada subgoal e quais parametros são considerados pode ser notado na representação em árvore abaixo.
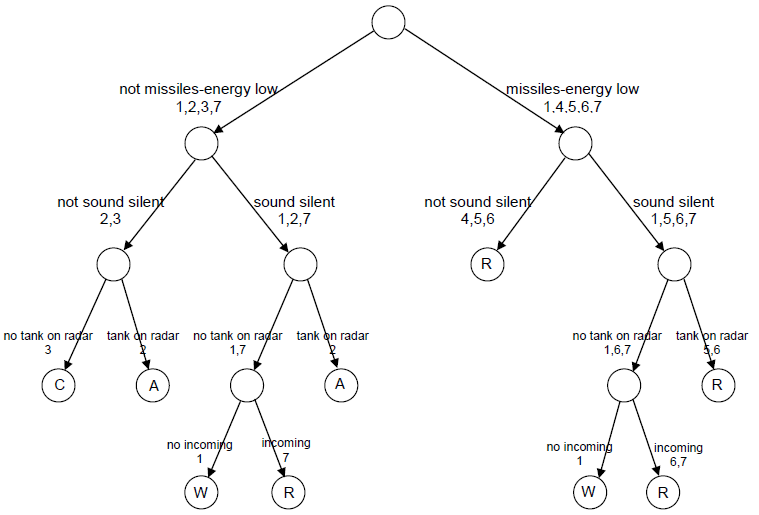
Figura8 - Representação da árvore com os elementos de decisão para cada subgoal.
Como resultado podemos ver o Soar seguindo o caminho correto conforme execução abaixo.
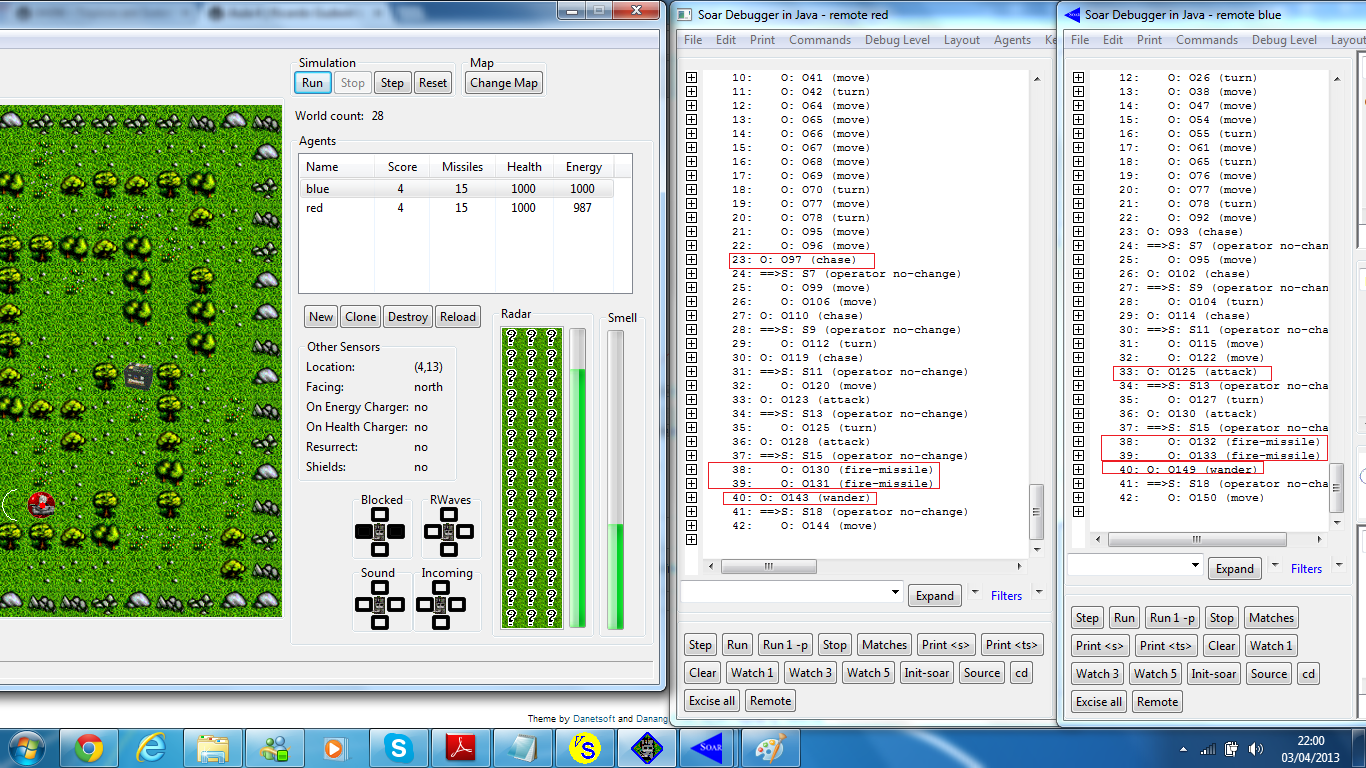
Figura9 - Wander, Chase e Attack
É possível notar que nos casos acima, os tanques tinham energia e mísseis suficientes para enfrentar o ataque, logo a perseguição e o ataque aconteceram.
Em um momento posterior, com os tanques ja desgastados, podemos notar a fuga, conforme mostrado na figura a seguir.
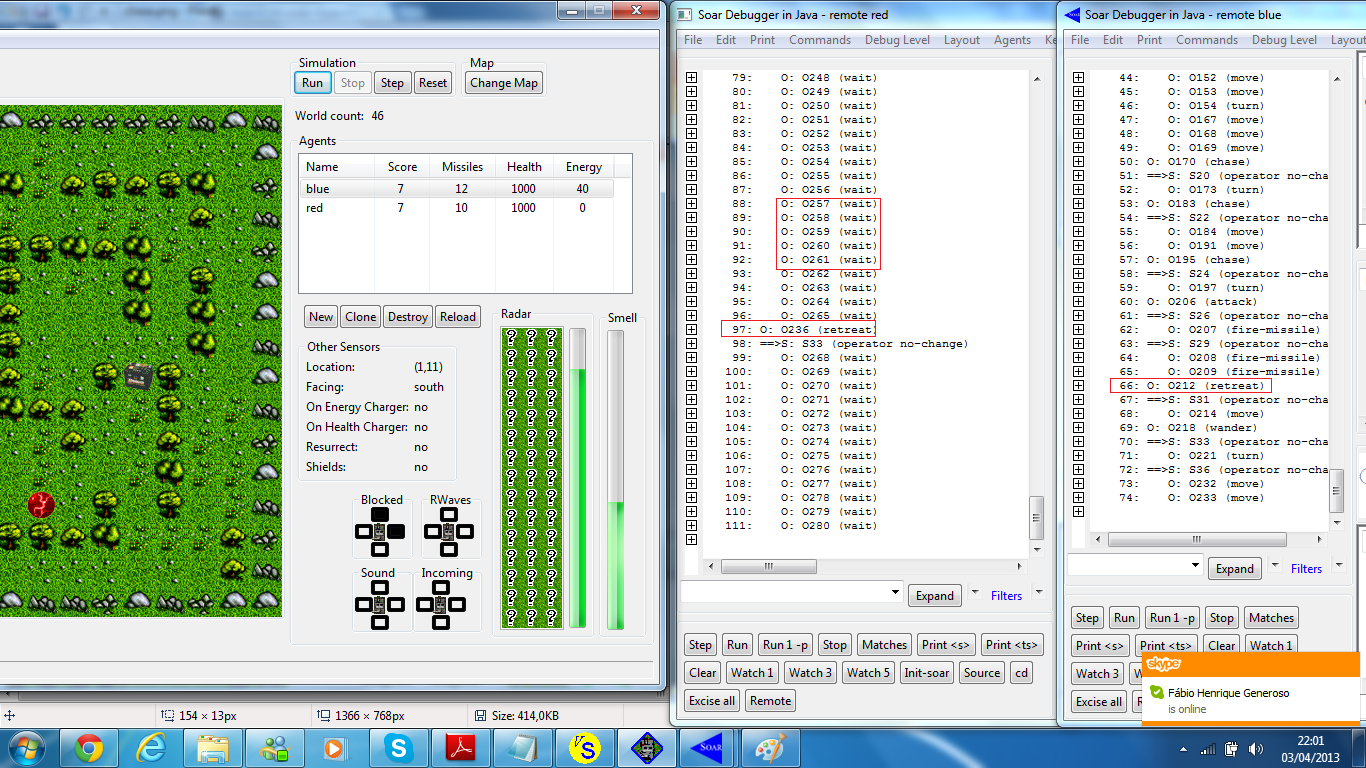
Figura10 - Fuga quando contato a vista porém sem energia para enfrentar a batalha
Nesse ponto podemos notar tambem a presenca das esperas. Nesse caso a espera é premeditada, pois o tanque sem energia fica escondido esperando o outro tanque passar sem encontra-lo. Há cenários onde por questão de um problema na aplicação, o Soar se depara em uma situação onde nenhum operador é proposto. Nessas condiçoes, o operador wait é necessário para impedir sobrecarga da pilha e esperar até que alguma condição dos sensores mude, fazendo com que um novo operador se faça proposto.

Figura11 - Crescimento desordenado da pilha
Na Figura11 foi forçada uma situação onde o wait seria necessário. É possível notar um crescimento desordenado da pilha, que se prolongado por muito tempo causaria sobrecarga da pilha.
Um artifício que podemos adicionar para melhorar a inteligência de nossos tanques é o mapeamento do cenário. Baseado nas medições dos sensores (principalmente radar e de bloqueio), o tanque pode armazenar essas informações de tal modo a mapear as áreas conhecidas do cenário e seus elementos, como por exemplo ondé há elementos de recarga de saúde e energia, onde estão os bloqueios e os caminhos abertos. Com isso é possível implementar táticas bem mais complexas, de forma a não deixar o tanque vulnerável, ou então buscar rapidamente uma recarga em fala de energia ou saúde, entre outros.
A implementação do mapeamento do cenário pode ser estudada a partir da execução do mapping-bot.soar do tutorial.

Figura12 - Operador para o mapeamento do cenário setando a informação de posição limpa
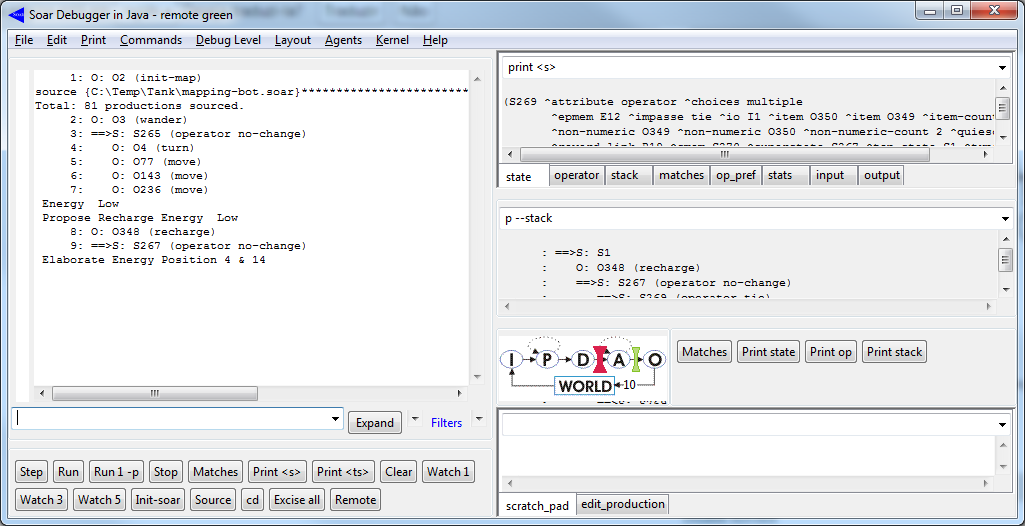
Podemos identificar na memória de trabalho onde estão posicionados os elementos já identificados pelo tanque. Na figura abaixo é possível ver a posição onde o elemento de recarga de energia se encontra.

Figura13 - Posição do elemento de recarga identificado pelo tanque
Com isso foi possível juntar todos os elementos e chegar ao objetivo dessa aula.
Para a sugestão da aplicação dessa aula, podemos propor uma alteração nos subgoals, criando um novo subgoal para recarga. Esse subgoal deve ter prioridade sobre Wander, porém case o tanque esteja sendo perseguido, é melhor fugir do que procurar uma recarga e ter que enfrentar uma batalha no caminho.

Figura 14 - Novo subgoal - Recharge
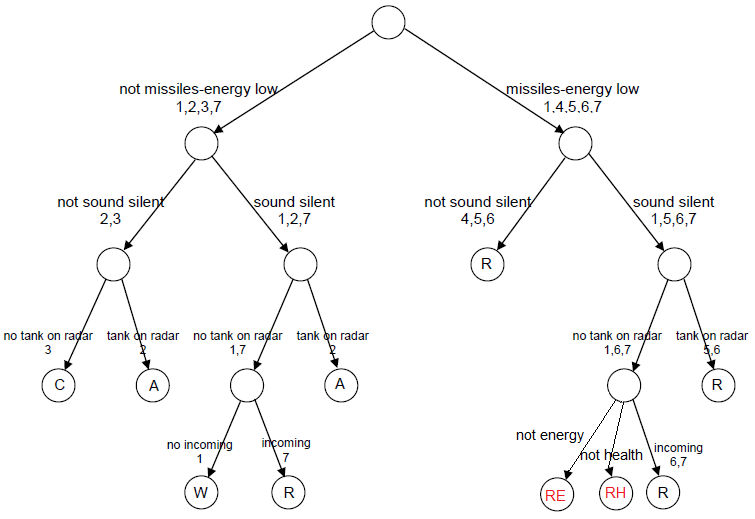
Figura15 - Nova árvore com o subgoal de Recharge para Energia e Saúde
Com essa idéia, podemos identificar a posição dos recarregadores checando os atributos no mapa:
- Para energia
- Para saúde
Referências: Tutorial 3 e Manual do pacote de documentação do Soar e codigos de exemplo do tutorial - mapping-bot e simple-bot
Theme by Danetsoft and Danang Probo Sayekti inspired by Maksimer